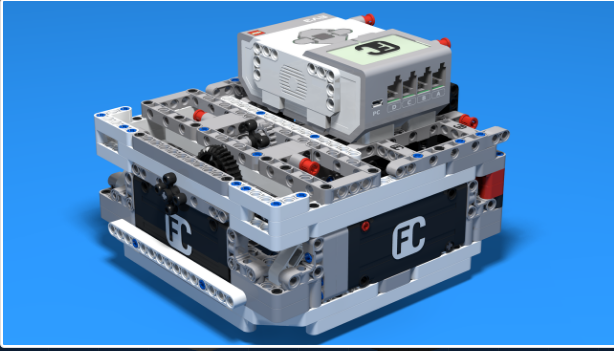
BOT 5 (current bot)

After going through multiple bots and looking at advantages and disadvantages, we decided to go with BOT 3, original design came from fllcast.com but then we made following improvements to bot by looking at this year missions. We don't intend to follow line, so we took out middle light sensor but kept left and right to align to line. Instead of puffy wheels used directional thread wheels like Used matched motors that rotate same number of rotations in a specific time. Also checked if one motor runs faster than other. Used a new Gyro as old one was drifting a lot. Wire management was improved by fishing wires through parts, so that they don't interfere with wheels. Bot was not completely flat from all sides, so we moved some pieces around, so that its easy to line up to wall.